Urban Mobility Swarms: Towards a Decentralized Autonomous Bicycle-Sharing System
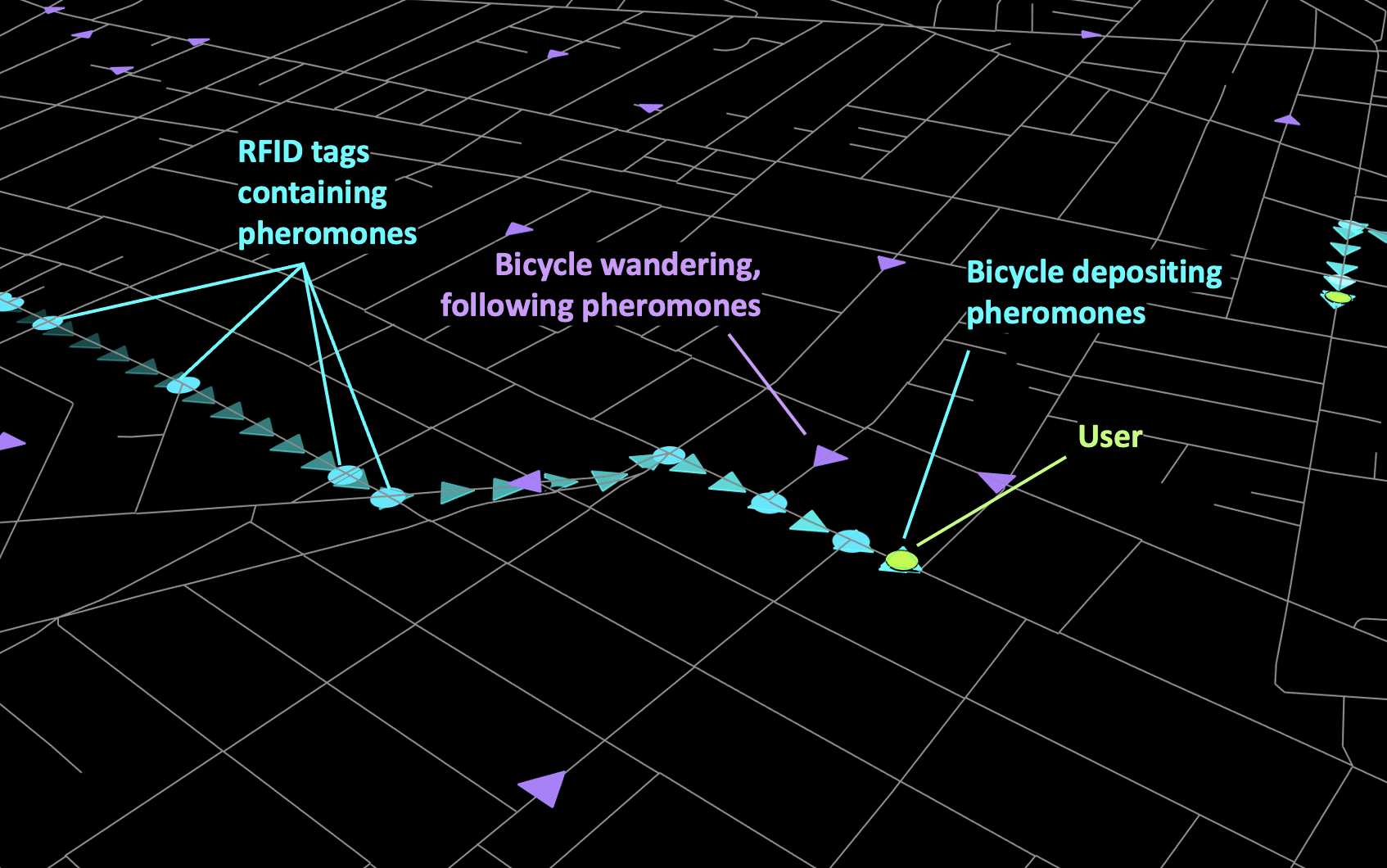
Urban mobility can often be categorized as a complex system—e.g., a nonlinear system composed of many interacting components with interdependent relationships. The growing trend towards shared, lightweight, and autonomous vehicles requires planning solutions that are less centralized and can manage the increasing complexities of new mobility. This research investigates planning strategies for shared micro-mobility systems, focusing on shared autonomous bicycles. Vehicle rebalancing within such systems poses a critical technical challenge and has substantial environmental and economic implications. To tackle this challenge, we propose a fully decentralized approach that allows autonomous bicycles to rebalance in a self-organizing manner via stigmergy, a bio-inspired mechanism for indirect communication. While the bicycles autonomously navigate their urban environment, they locally update RFID tags at intersections, leaving virtual pheromone trails that collectively guide each other toward high-demand areas. The efficacy of our approach is assessed through a realistic agent-based model of Cambridge, MA (USA). Results highlight the capacity of autonomous bicycles to rebalance in a self-organized manner, using strictly decentralized local communication, while significantly reducing the average user wait time compared to no rebalancing and random rebalancing. These findings emphasize the feasibility and potential of decentralized planning strategies in handling complexity within new mobility systems.
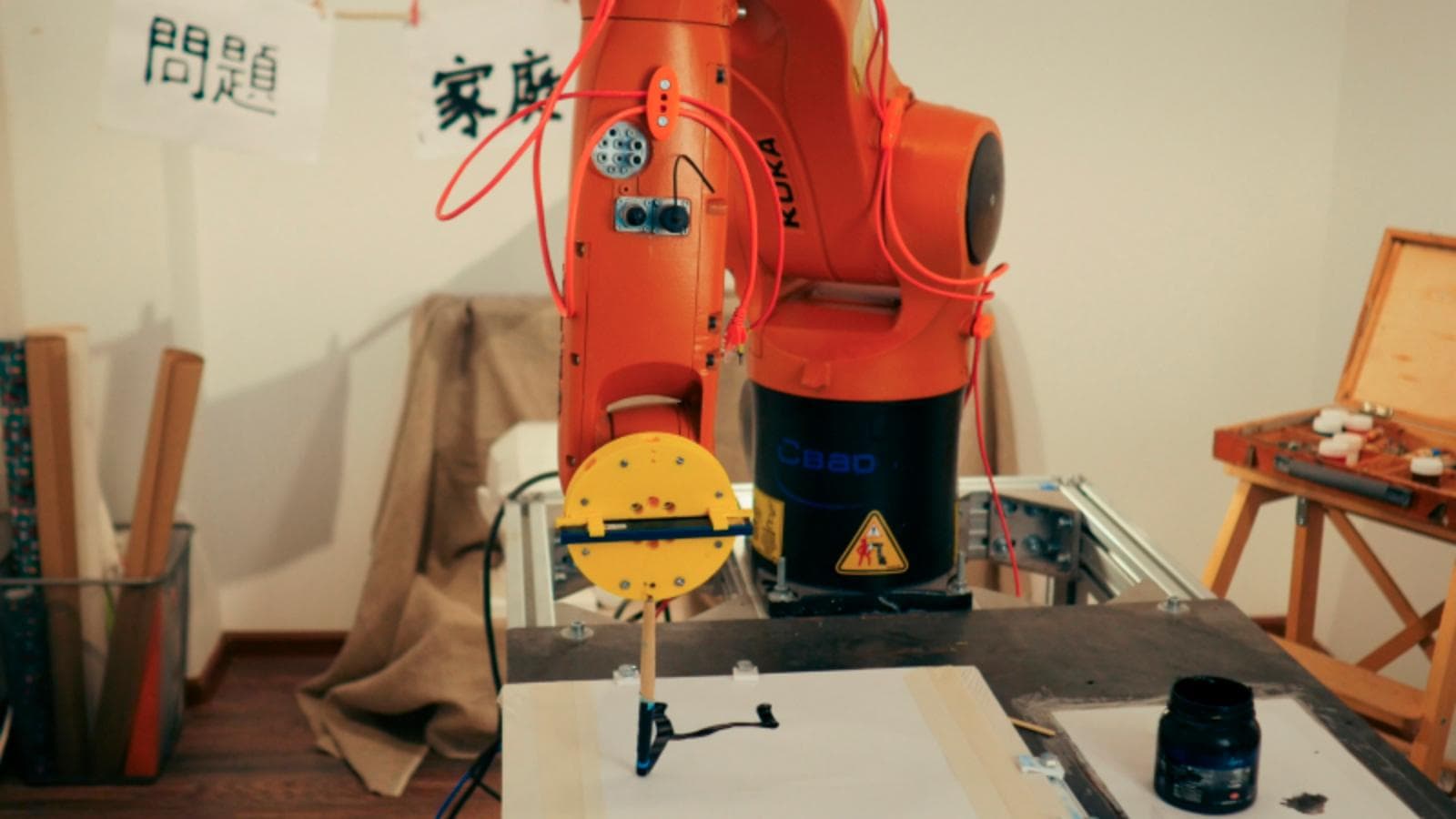
Gaka-Chu: A Self-Employed Autonomous Robot Artist
The physical autonomy of robots is well understood both theoretically and practically. By contrast, there is almost no research exploring their potential economic autonomy. In this paper, we present the first economically autonomous robot-a robot able to produce marketable goods while having full control over the use of its generated income. Gaka-chu (“painter” in Japanese) is a 6-axis robot arm that creates paintings of Japanese characters from an autoselected keyword. By using a blockchain-based smart contract, Gaka-chu can autonomously list a painting it made for sale in an online auction. In this transaction, the robot interacts with the human bidders as a peer not as a tool. Using the blockchain-based smart contract, Gaka-chu can then use its income from selling paintings to replenish its resources by autonomously ordering materials from an online art shop. We built the Gaka-chu prototype with an Ethereum-based smart contract and ran a 6-month long experiment, during which the robot created and sold four paintings, simultaneously using its income to purchase supplies and repay initial investors. In this work, we present the results of the experiments conducted and discuss the implications of economically autonomous robots.
If blockchain is the solution, robot security is the problem
Robotics systems of all types are revolutionizing a wide variety of industries—transportation, manufacturing, and even healthcare—and yet, many essential ingredients for robotics systems in the real world are not technologically ready for deployment. Currently, robots lack the protocols and standards required to be safe and secure outside factories. In an attempt to close this gap, recent research has demonstrated the security benefits of combining robotics systems with blockchain-based and related technologies (e.g., smart contracts, zero-knowledge proofs). In this article, I argue that blockchain-based robotics is starting to provide innovative solutions to urgent problems of robot security. I list the most important takeaways so far from this field that I helped establish together with a growing community. I close the article by discussing the implications of the security challenges that the robotics research community is facing, and possible ways for us to move forward.
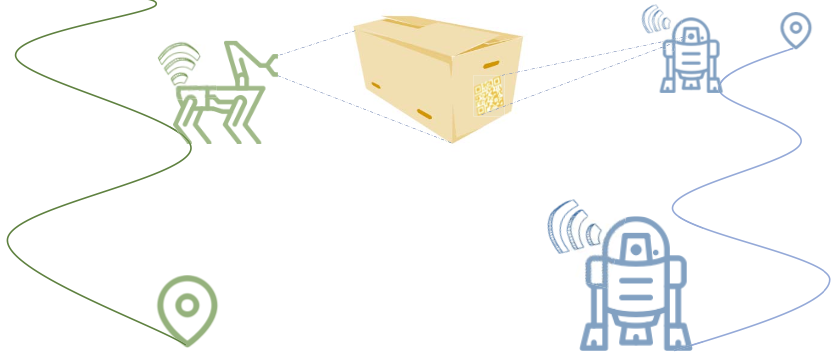
Secure Encoded Instruction Graphs for End-to-End Data Validation in Autonomous Robots
As autonomous robots are becoming more widespread, more attention is being paid to the security of robotic operations. Autonomous robots can be seen as cyber–physical systems: they can operate in virtual, physical, and human realms. Therefore, securing the operations of autonomous robots requires not only securing their data (e.g., sensor inputs and mission instructions) but securing their interactions with their environment. There is currently a deficiency of methods that would allow robots to securely ensure their sensors and actuators are operating correctly without external feedback.
Following leaders in byzantine multirobot systems by using blockchain technology
Interest in multirobot systems is rising rapidly both in academia and in industry. The use of multiple robots working in a coordinated way, rather than a single robot, has several advantages in a diverse range of applications. However, few studies have focused on operations in which robots can behave maliciously and alter the outcome of the collective mission. In this article, we present a set of Byzantine Follow The Leader (BFTL) problems, in which a subset of robots in the system shows unintended or inconsistent behavior (i.e., Byzantine robots). In the BFTL problems, leaders discover routes from their starting positions to specific destinations and guide the followers, while Byzantine robots try to hinder the leaders and mislead the followers. In this research, blockchain technology is used as a communication tool within multirobot systems, for leaders to broadcast directions to the whole group. We propose algorithms to tackle the BFTL problems, prove their correctness, and validate them in simulated experiments of realistic scenarios. Results show that the proposed algorithms mitigate the impact of Byzantine robots in multirobot systems conducting a BFTL mission. Our analysis provides minimum and maximum boundary calculations for important metrics including number of robots reaching their destination, number of steps taken, and weight requirements of the chain used during the mission. Our results provide a path toward the deployment of byzantine-resistant real-world multirobot systems.
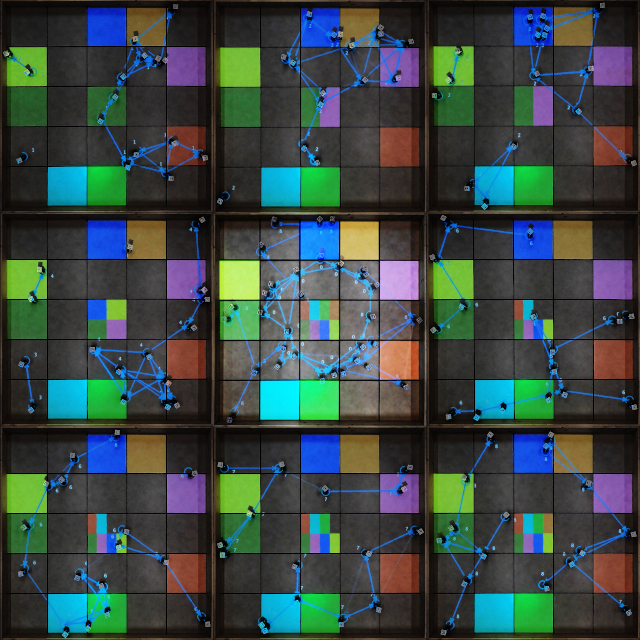
Secure and secret cooperation in robot swarms
The importance of swarm robotics systems in both academic research and real-world applications is steadily increasing. However, to reach widespread adoption, new models that ensure the secure cooperation of large groups of robots need to be developed. This work introduces a method to encapsulate cooperative robotic missions in an authenticated data structure known as a Merkle tree. With this method, operators can provide the “blueprint” of the swarm’s mission without disclosing its raw data. In other words, data verification can be separated from data itself. We propose a system where robots in a swarm, to cooperate toward mission completion, have to “prove” their integrity to their peers by exchanging cryptographic proofs. We show the implications of this approach for two different swarm robotics missions: foraging and maze formation. In both missions, swarm robots were able to cooperate and carry out sequential tasks without having explicit knowledge about the mission’s high-level objectives. The results presented in this work demonstrate the feasibility of using Merkle trees as a cooperation mechanism for swarm robotics systems in both simulation and real-robot experiments, which has implications for future decentralized robotics applications where security plays a crucial role.